Line-following robot (firmware)¶
| date: | May 28, 2009 |
|---|
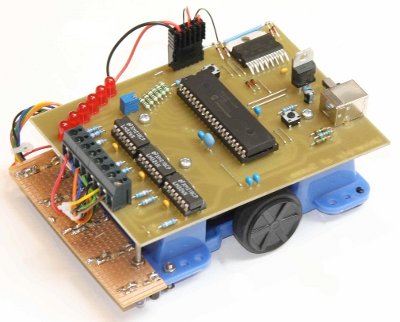
Build reference picture
This was a second-year Embedded Systems Application Project at university. We were given the hardware and after assembling the robot, had to write firmware for it. The PIC microcontroller programming was done in C.
As it was the first time this course was run, objectives were not concrete and were updated as students progressed. Some of the objectives were:
- follow a line
- go over a ramp
- memorise a track
Hardware¶
At the centre of the board, we had a PIC 18F4450 microcontroller. The PIC was preprogrammed with a bootloader, which enabled programs to be loaded using only a USB cable.
Five IR diode/photodiode pairs were used to detect a line. Sensitivity could be adjusted using a potentiometer to set a comparator treshold voltage.
Two DC motors were driven by an L298 dual full-bridge driver IC. By pulling the inputs low or high, one can make motors spin forward or backwards. Turning left or right is done by spinning one of the wheels (slow turn), or by making them spin in different directions (fast turn).
Six on-board LEDs were used for debugging and as a User Interface.
Firmware¶
The programming was done using MPLAB IDE and C18 compiler. Driver software, provided by Microchip, was used to load hex files onto the microcontroller.
On top of fulfilling the objectives, a simple menu system was implemented. Using on-board switches and LED feedback, user could select one of the six different modes:
- Idle - to do nothing, flash LEDs
- Test - to output data from sensors to LEDs
- Normal - to follow the line
- Ramp - to go over the ramp
- Memorise - to memorise and replay
- Mode selection - this is the mode which is active until one of the above modes is confirmed
Here is a short video of a test run as home:

Track setup